源头工厂
降低成本
一站式服务
质量保证
性价比高
使用寿命长
全国咨询热线
降低成本
质量保证
使用寿命长
公司凭借优质的产品和良好的销售及售后服务,赢得了广大客户的信任与支持。
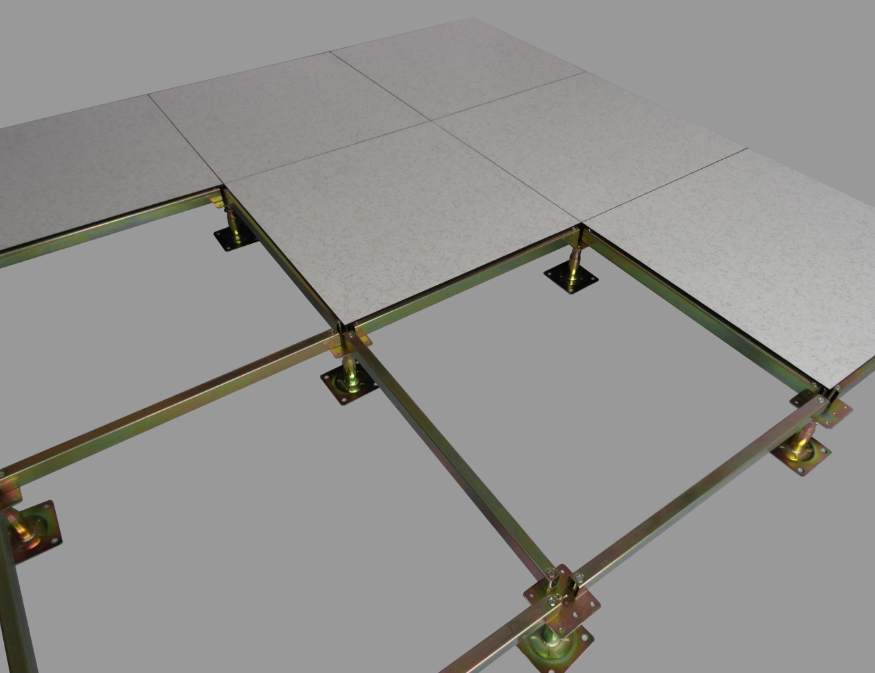
由人体走路鞋子和地板会摩擦产生静电并吸引灰尘,对于一些精密的电子或者特殊场所如计算机机房、电视发射台控制室、医院手...
2024-03-23消防控制室作为一个特殊的工作场所,其地面材料的选择应该符合相关的规范和标准。以下是消防控制室防静电地板应用规范的一些要点...
2024-03-23分散剂运输的重要性与挑战! 分散剂在现代工业中扮演着关键的角色,用于稳定悬浮颗粒、提高流体性能等多种应用。然而...
2023-12-06水煤浆作为一种高效的燃料形式,其添加剂在生产和使用中起到了至关重要的作用。本文将着重介绍水煤浆添加剂的应用领域和其在提高...
2023-12-06技术先进、厂家直销、性价比高;全产业链布局、售后服务更有保障
 贵公网安备 52273002000000号
贵公网安备 52273002000000号






 电话沟通
电话沟通 支付定金
支付定金![]](./fxgjg_files/lc3.png) 安排发货
安排发货 货到付款
货到付款 进行安装
进行安装 售后服务
售后服务